Featured Projects
In Development
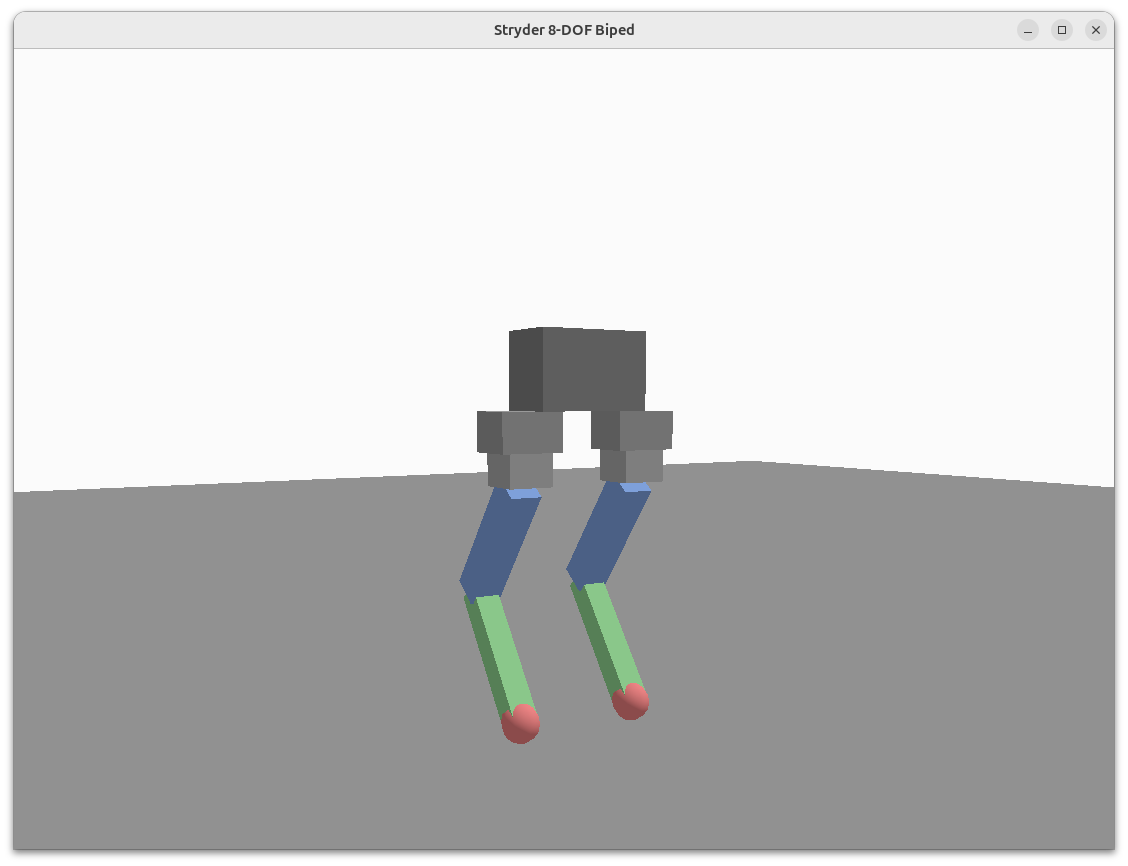
stryder: Bipedal Locomotion Platform
Transformer-based RL policies for 8-DOF point-foot biped locomotion, using student-teacher distillation for sim-to-real transfer. Built on the blank engine. This is the evolution from veritas project applying the fast update rate of the neural network with the power of transformers. The multi-head attention model seems perfect for the complexity of a walking robot.